-
2024 summary
Having not posted for over a year, I thought I would make a summary of what has been going on with the project since my last post. Not much progress or work was done at the beginning of the year. My bachelor’s thesis, together with other school projects, ended up taking much of my time.…
-
Version 1.0

Since my last update, I’ve been concentrating on completing the first hardware iteration of my robot. Previously, the robot existed as a basic prototype, and it required significant improvements. This post aims to provide a brief summary of the progress made and the tasks accomplished. Motors and gears I was a bit surprised when the…
-
Dockerize everything!

Since my last post, I have been busy dockerizing the entire project and integrating all the sensors into ROS. Each sensor is now running in an isolated Docker container and publishing sensor data. As I am not an expert in Docker, I took a Udemy course to familiarize myself with it. Now, everything has been…
-
Nav2 setup

Just finished setting up the first version of my navigation stack. I’m using the Navigation 2 stack for Ros2. Below is a sped up video where the robot gets a goal position and manages to get there on its own. Here is a photo of the transformation tree. It is used to calculate the positions…
-
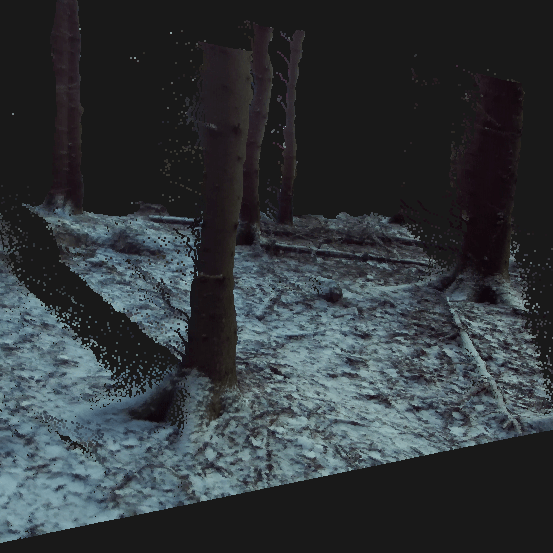
Simulation setup

I have now successfully imported the model (step file) into NVIDIA’s own robot simulator Isaac sim that I will be using. The robot have revolving joints for each wheel. The robot currently have an IMU, 360 degree lidar and a camera configured, and their output can be seen in rviz2. Everything is also ported to…
-
First prototype
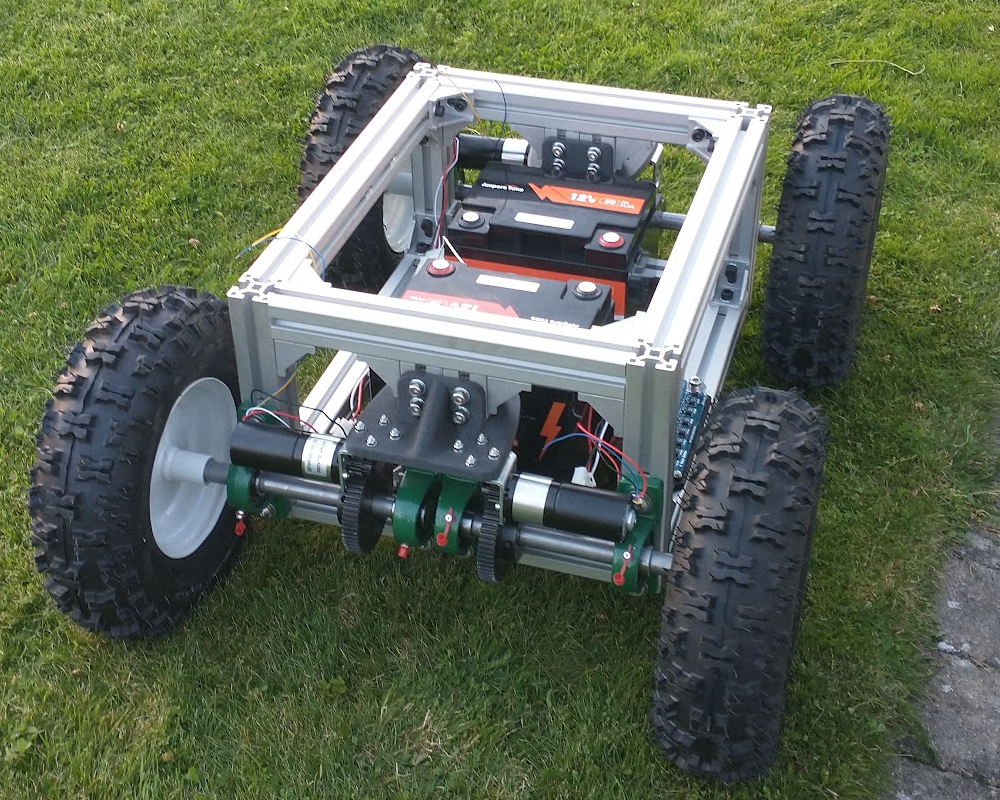
Last spring (2022) I started designing my own robot using SOLIDWORKS. Once I was happy with the design I sources the parts, put it together during the summer. I ended up with the first version. It’s mostly made with 40×40 aluminum profiles and is really solid. This is a photo in the end of the…
-
Subscribe
Subscribed
Already have a WordPress.com account? Log in now.
