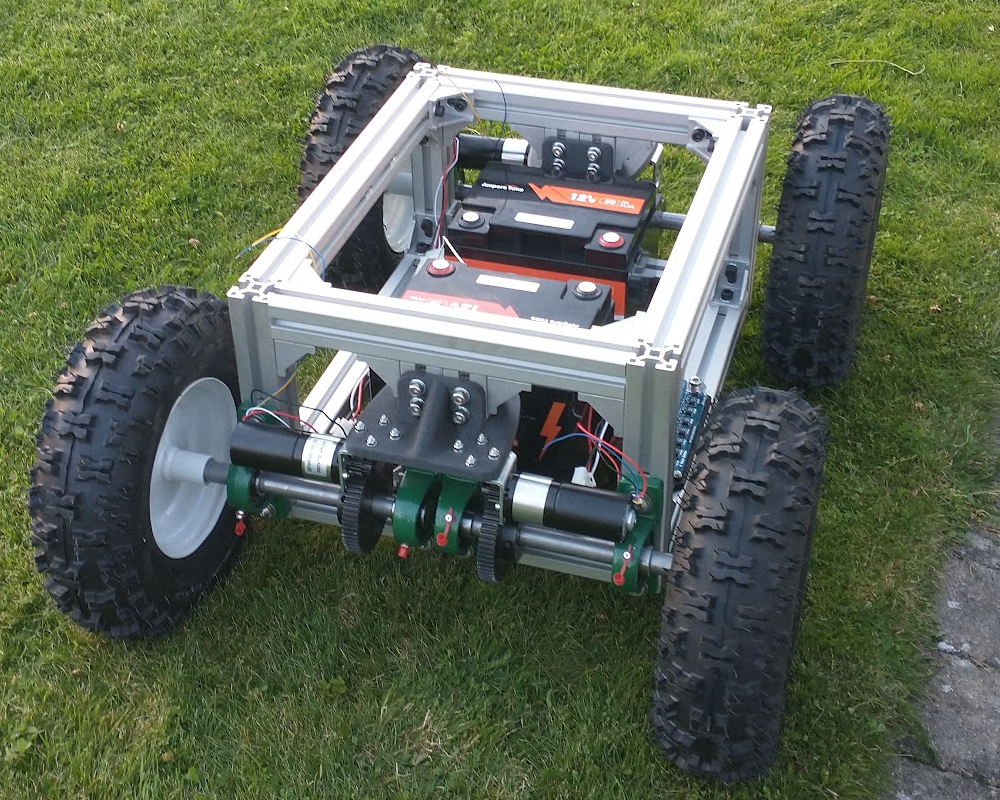
Last spring (2022) I started designing my own robot using SOLIDWORKS. Once I was happy with the design I sources the parts, put it together during the summer. I ended up with the first version. It’s mostly made with 40×40 aluminum profiles and is really solid.
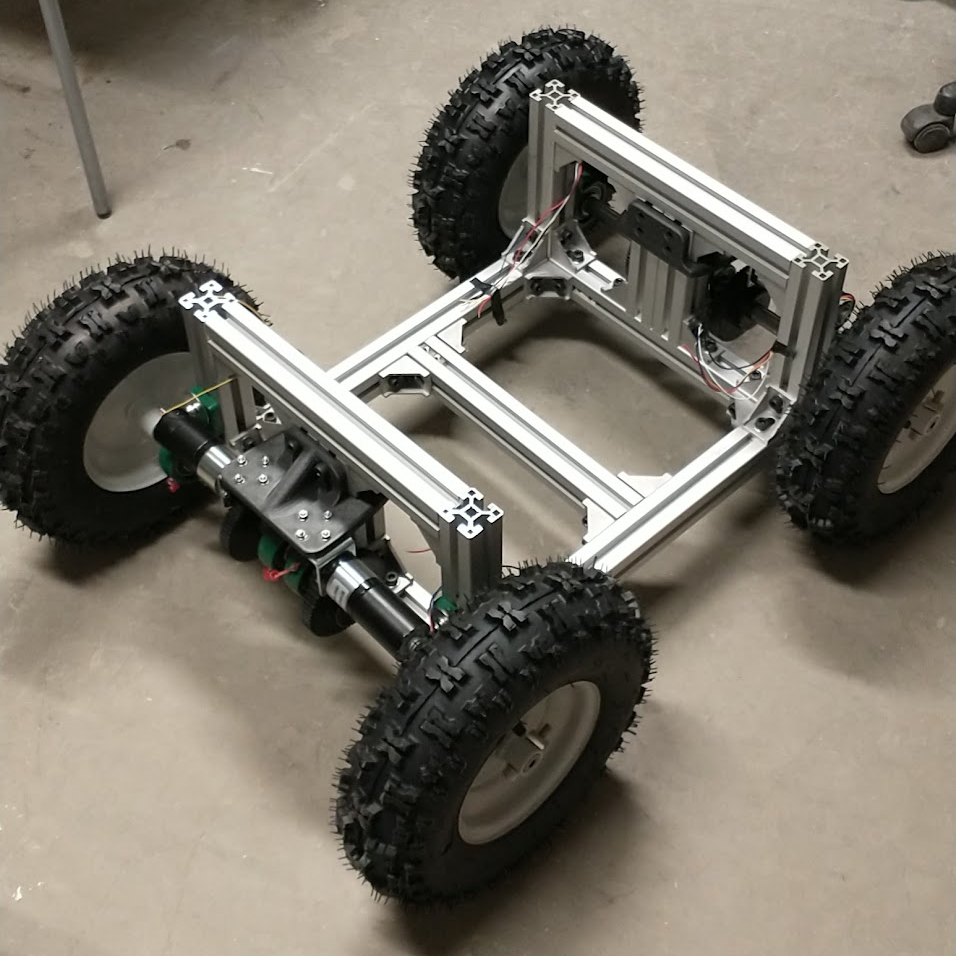
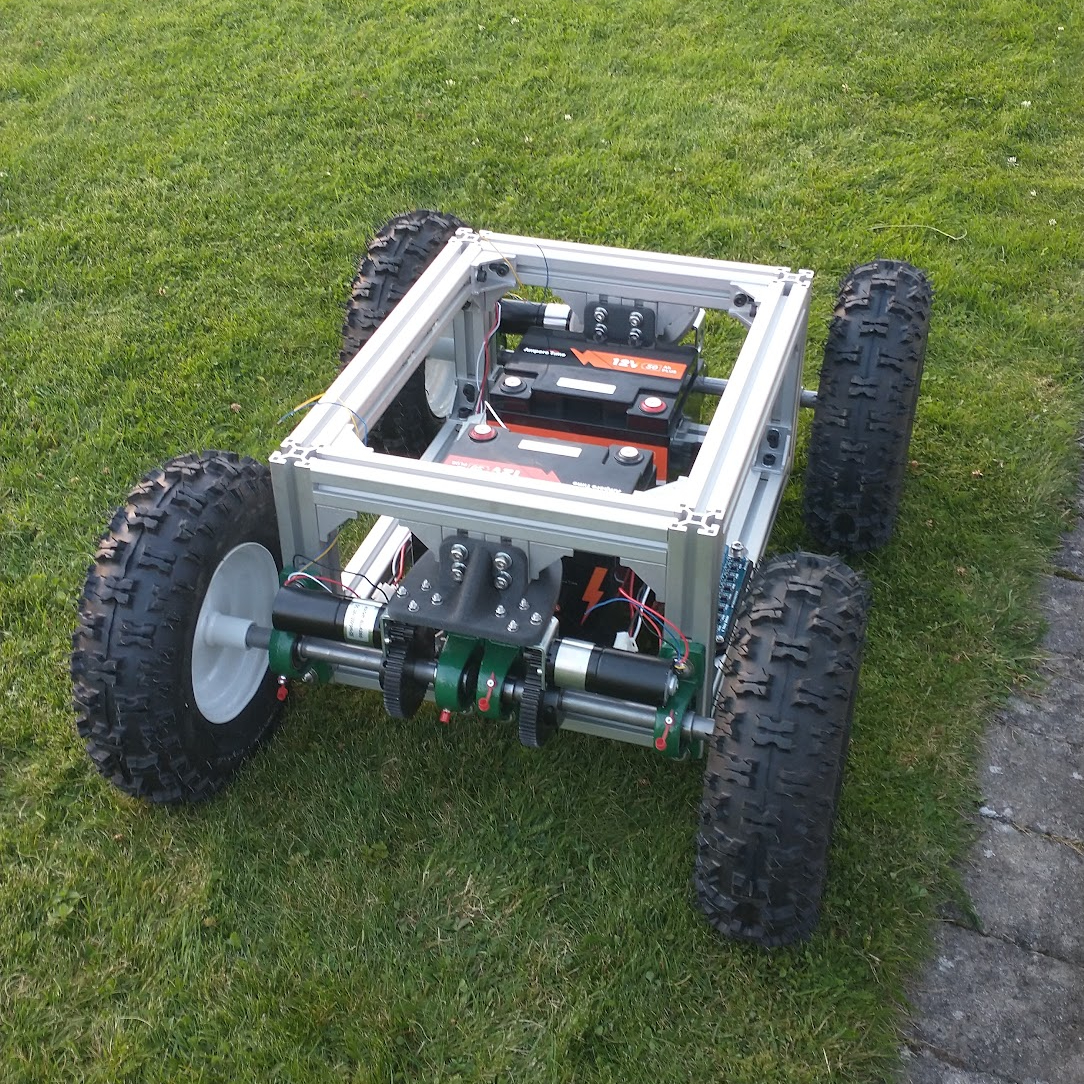
This is a photo in the end of the summer. It have no onboard computer and is turned on with a switch. The weight of the robot is around 50 kg, and have the battery capacity of 24 V 50 amp. The problem with this motor/gear design is that if it is in a certain angle it will start to accelerate and the motors can’t break it.

One response to “First prototype”
[…] The image below illustrates how the worm gear gearbox functions. Essentially, the top screw part rotates, causing the large gear to turn. The reason I chose this solution is because it can only turn in one direction. The motor turns the screw, which in turn rotates the big gear. It can’t turn in the opposite direction, effectively acting as a passive brake when the motors are turned off. The first prototype had a problem with this and if you want to read more about it you can click here. […]