
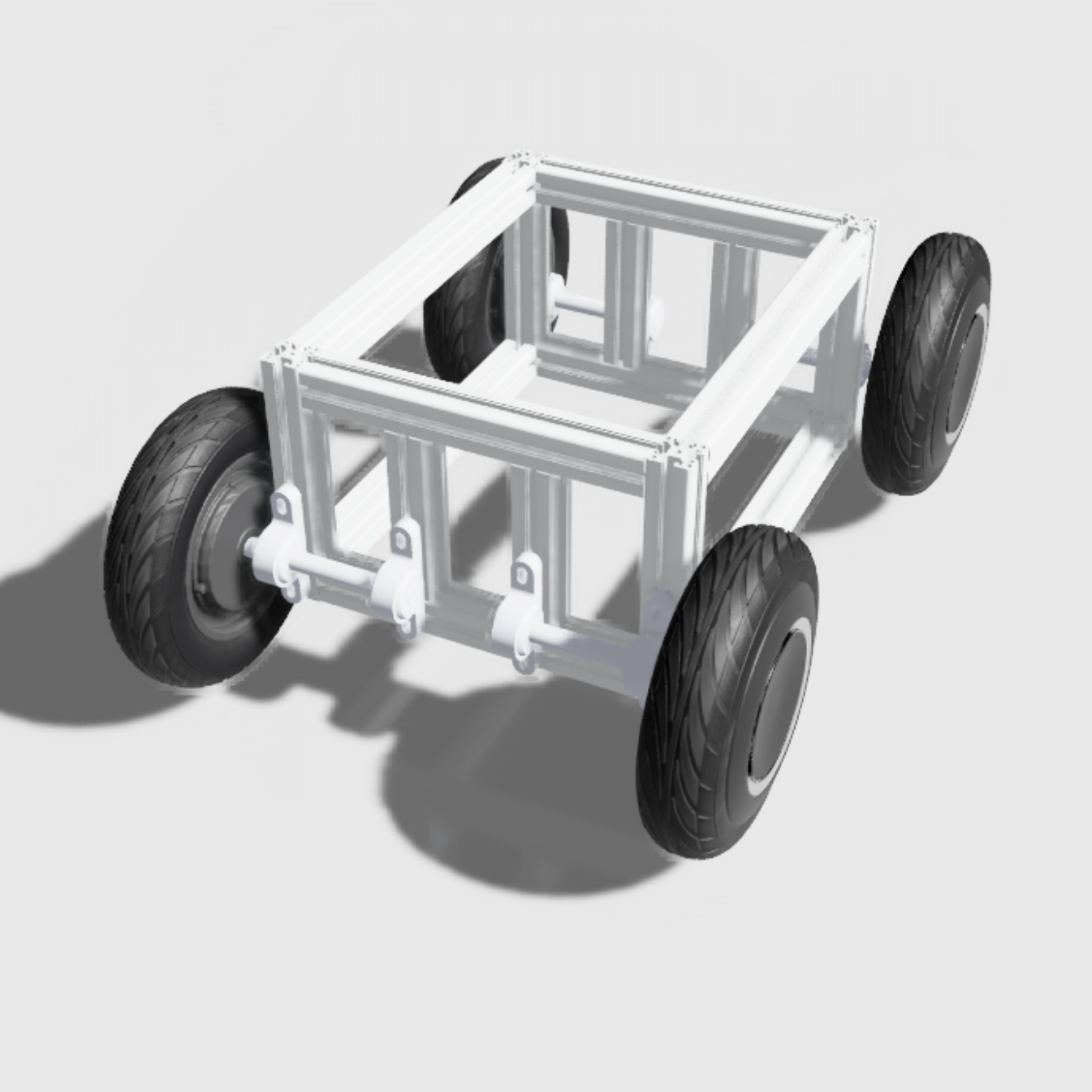
I have now successfully imported the model (step file) into NVIDIA’s own robot simulator Isaac sim that I will be using. The robot have revolving joints for each wheel. The robot currently have an IMU, 360 degree lidar and a camera configured, and their output can be seen in rviz2.
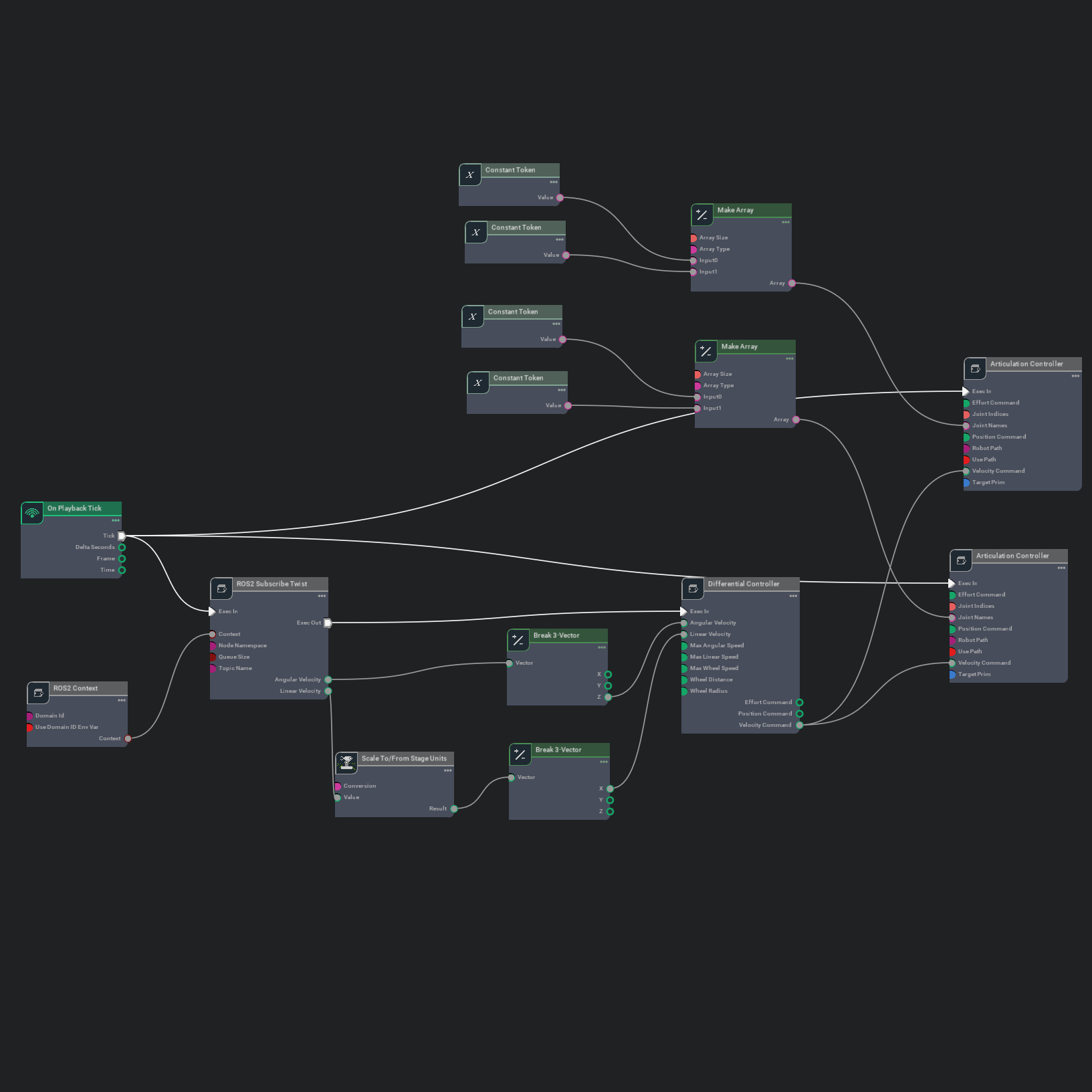
Everything is also ported to ROS 2. Isaac sim have made it simple to port between the simulation an ROS 2. Their visual scripting is a simple drag and drop tool for this. Bellow is and action graph of how the wheels are controlled. It’s just listen to the /cmd_vel topic and manipulate the value to correct form and then outputs the values to the correct wheel joint.
A simple world have also been created, where I will work out the navigation (NAV2) which is the next part I will be working on.

